Publications
2025
-
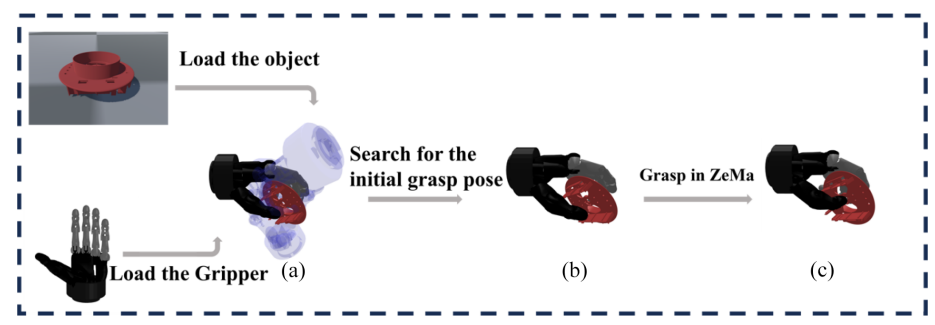
 GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled GraspingInternational Conference on Intelligent Robots and Systems, 2025
GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled GraspingInternational Conference on Intelligent Robots and Systems, 2025 -
 A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive SimulationInternational Conference on Intelligent Robots and Systems, 2025
A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive SimulationInternational Conference on Intelligent Robots and Systems, 2025 -
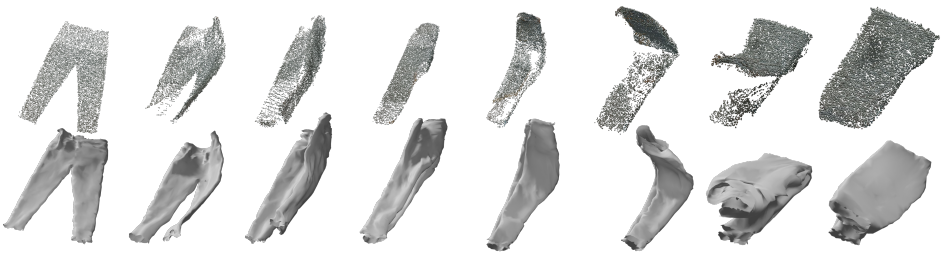
 Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable PhysicsACM Transactions on Graphics, 2025
Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable PhysicsACM Transactions on Graphics, 2025 -
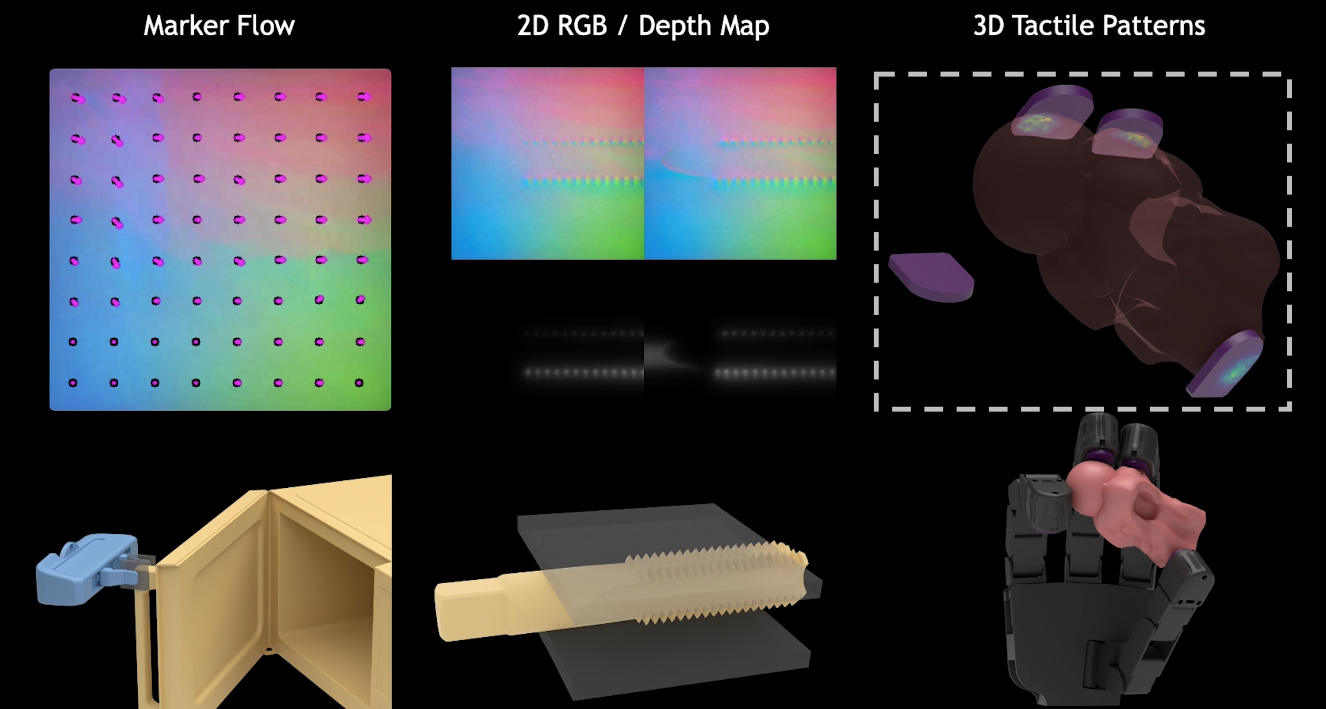 Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU SimulationArxiv, 2025
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU SimulationArxiv, 2025 -
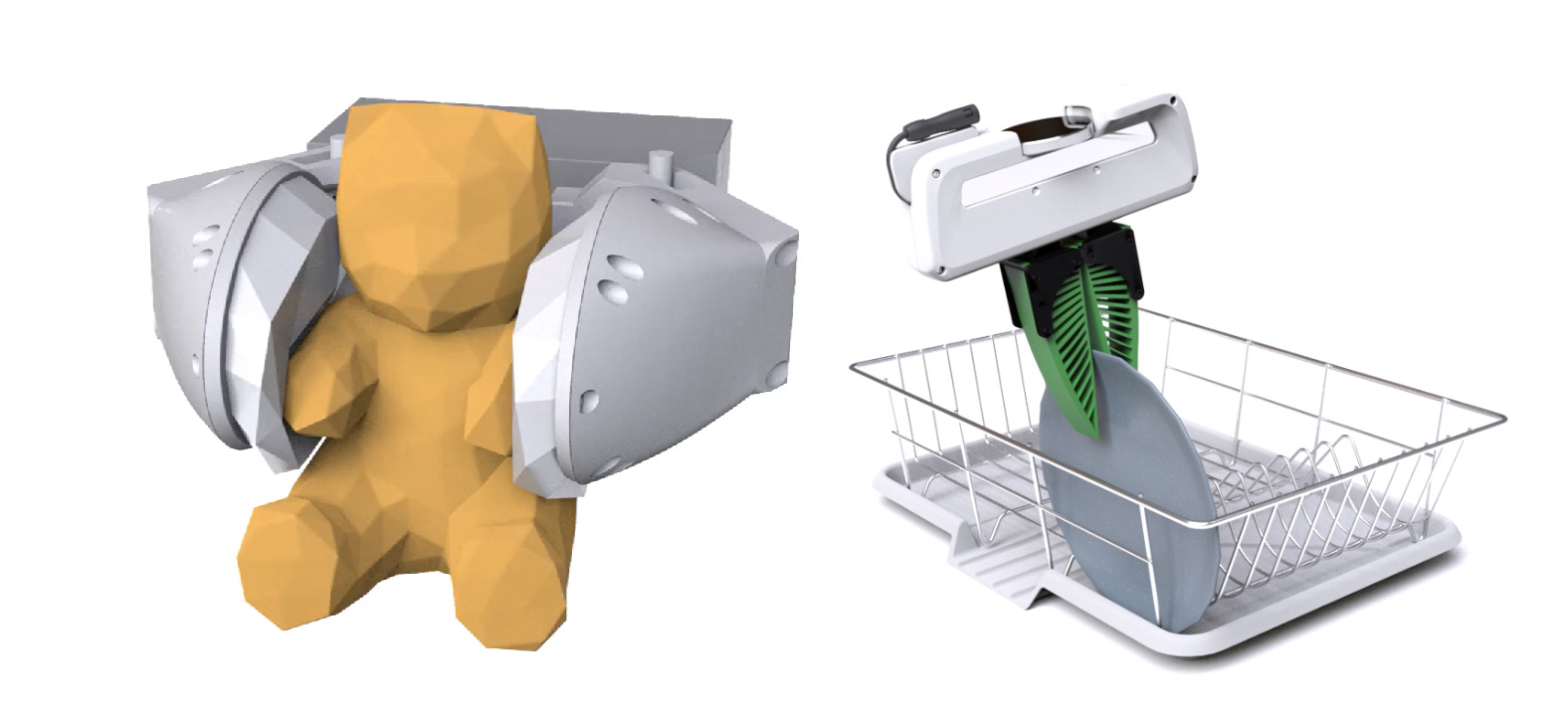
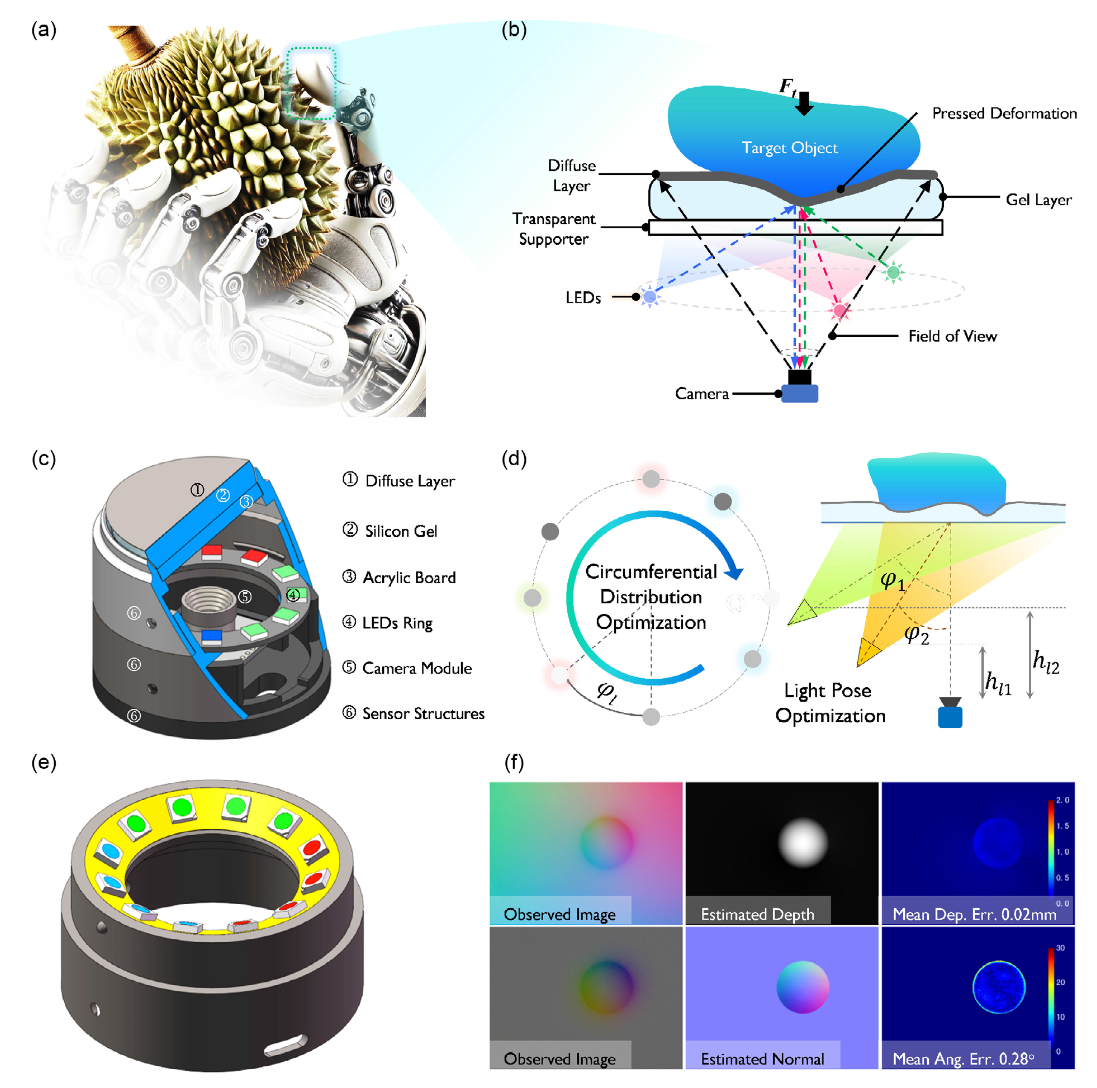 GelLight: Illumination Design, Modeling, and Optimization for Camera-Based Tactile SensorAdvanced Intelligent Systems, 2025
GelLight: Illumination Design, Modeling, and Optimization for Camera-Based Tactile SensorAdvanced Intelligent Systems, 2025
2024
-
 Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot ManipulationICRA, 2024
Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot ManipulationICRA, 2024 -
 Capturing forceful interaction with deformable objects using a deep learning-powered stretchable tactile arrayNature Communications, 2024
Capturing forceful interaction with deformable objects using a deep learning-powered stretchable tactile arrayNature Communications, 2024 -
 Intersection-Free Robot Manipulation With Soft-Rigid Coupled Incremental Potential ContactIEEE Robotics and Automation Letters, 2024
Intersection-Free Robot Manipulation With Soft-Rigid Coupled Incremental Potential ContactIEEE Robotics and Automation Letters, 2024 -
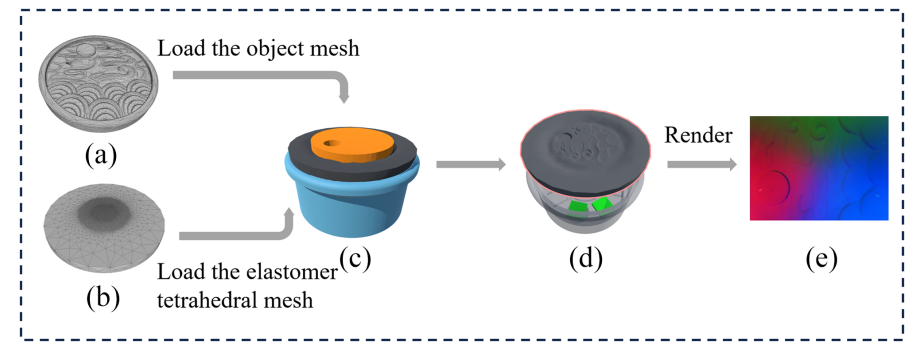 TacIPC: Intersection-and Inversion-Free FEM-Based Elastomer Simulation for Optical Tactile SensorsIEEE Robotics and Automation Letters, 2024
TacIPC: Intersection-and Inversion-Free FEM-Based Elastomer Simulation for Optical Tactile SensorsIEEE Robotics and Automation Letters, 2024
2023
-
 Clothpose: A real-world benchmark for visual analysis of garment pose via an indirect recording solutionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023
Clothpose: A real-world benchmark for visual analysis of garment pose via an indirect recording solutionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023 -
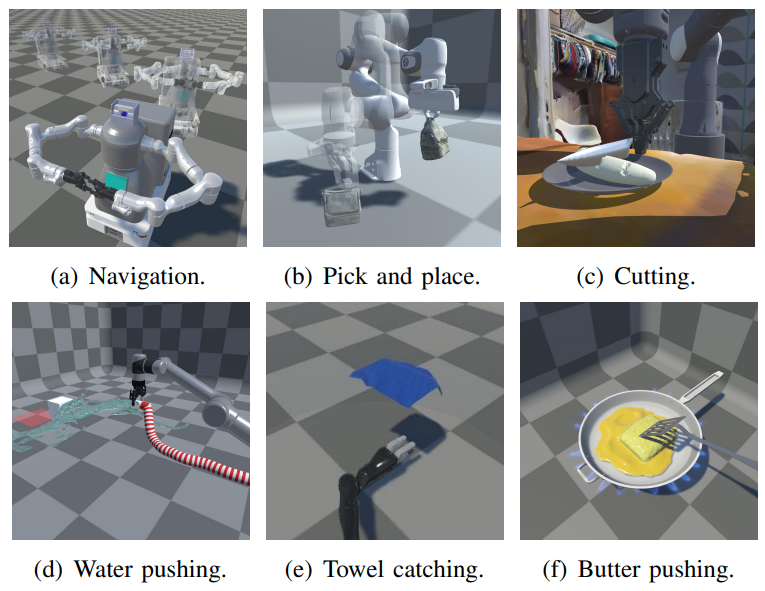 Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI.In Robotics: Science and Systems, 2023
Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI.In Robotics: Science and Systems, 2023 -
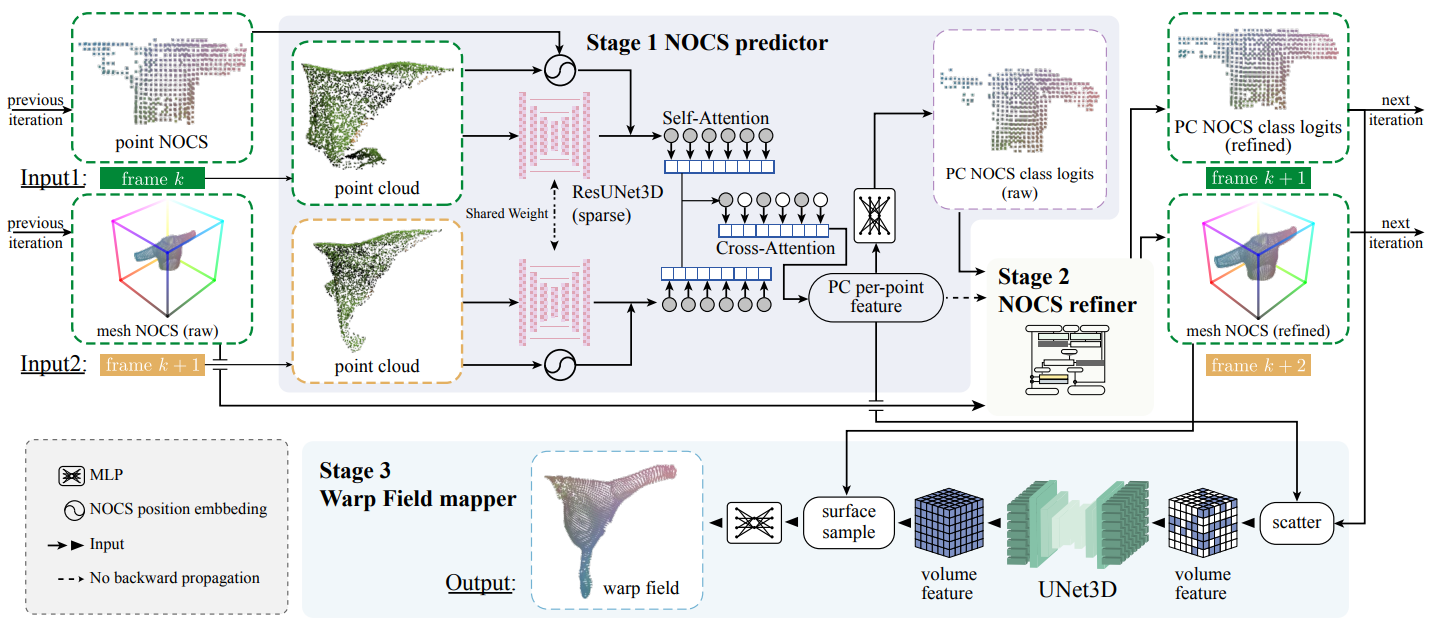 Garmenttracking: Category-level garment pose trackingIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
Garmenttracking: Category-level garment pose trackingIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023