Wenxin Du
I am a research assistant at the AIVC Lab at UCLA, advised by Prof. Chenfanfu Jiang. Previously, I received my M.S. in Computer Science from Shanghai Jiao Tong University (SJTU), where I was advised by Prof. Cewu Lu, and my B.S. in Information and Computing Science from the School of the Gifted Young at the University of Science and Technology of China (USTC). I also interned at ZenusTech, focusing on physics-based simulation and high-performance computing under the guidance of Xinxin Zhang and Xinlei Wang.
My research interests lie in physics-based simulation, tactile perception, and machine learning for robotics.
Selected Publications
-
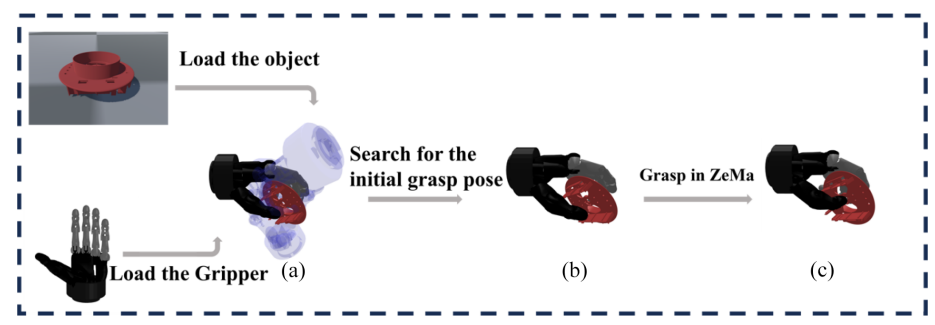
 GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled GraspingInternational Conference on Intelligent Robots and Systems, 2025
GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled GraspingInternational Conference on Intelligent Robots and Systems, 2025 -
 A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive SimulationInternational Conference on Intelligent Robots and Systems, 2025
A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive SimulationInternational Conference on Intelligent Robots and Systems, 2025 -
 Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable PhysicsACM Transactions on Graphics, 2025
Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable PhysicsACM Transactions on Graphics, 2025 -
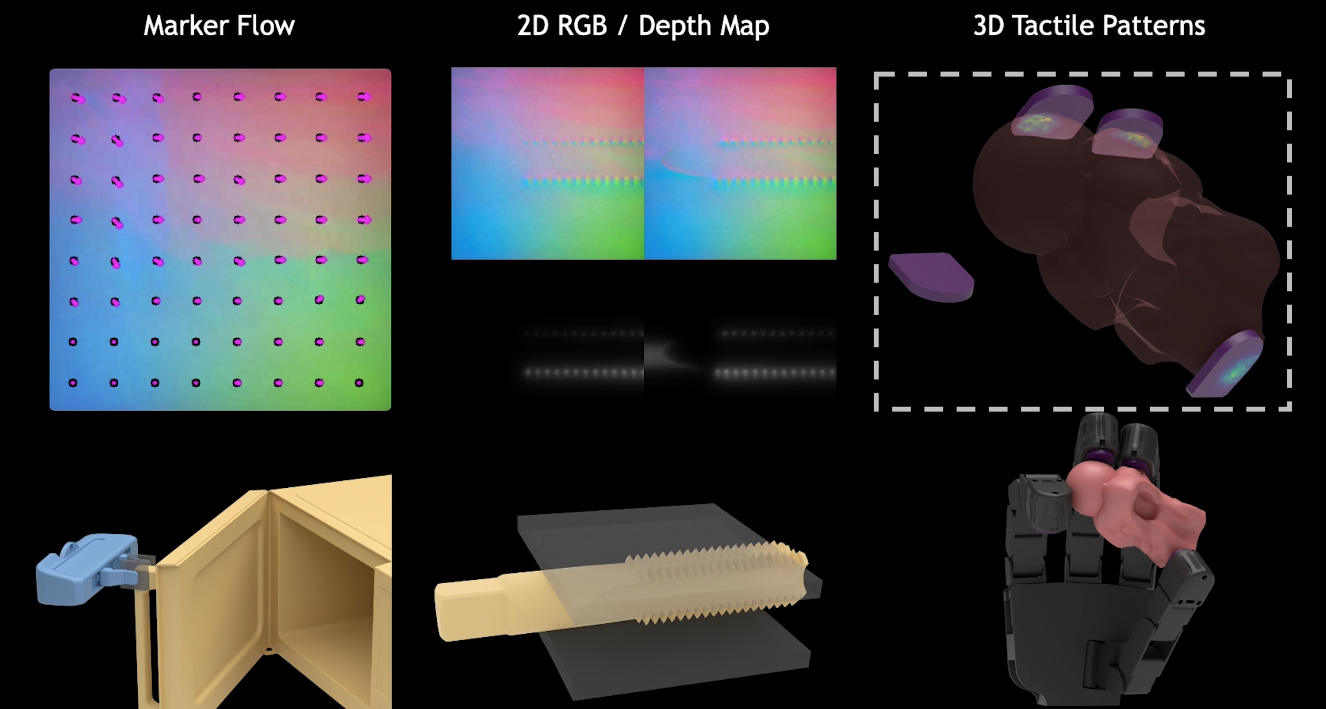 Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU SimulationArxiv, 2025
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU SimulationArxiv, 2025 -
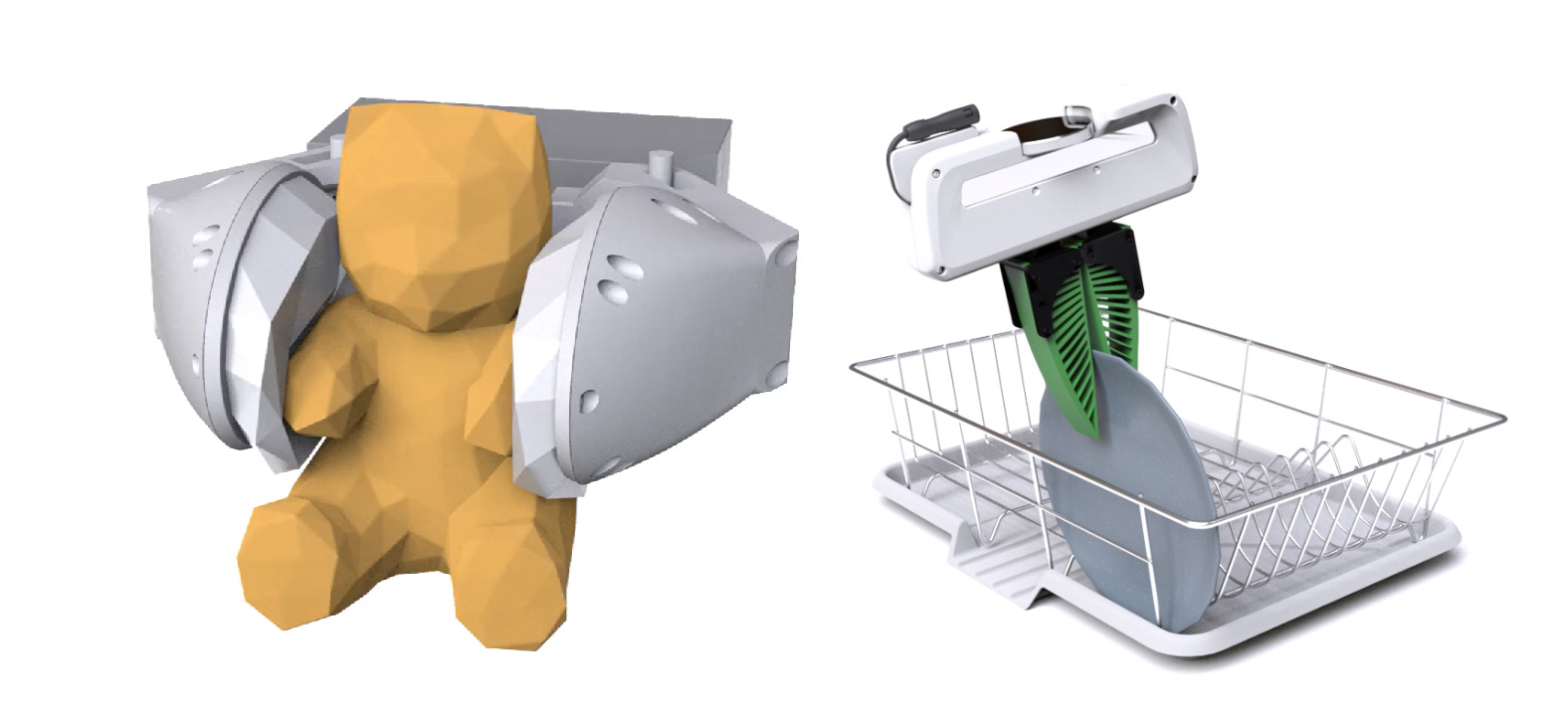
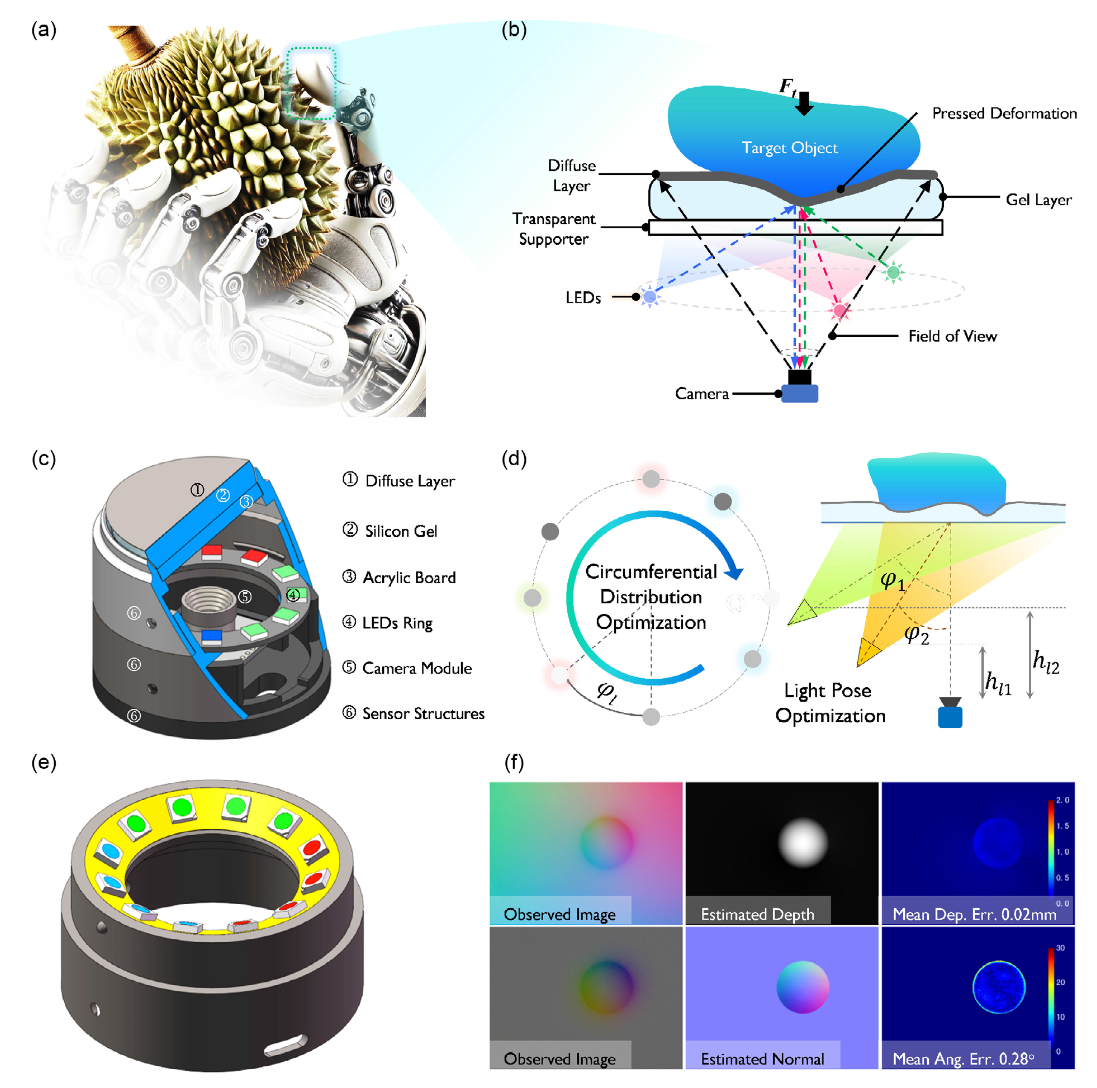 GelLight: Illumination Design, Modeling, and Optimization for Camera-Based Tactile SensorAdvanced Intelligent Systems, 2025
GelLight: Illumination Design, Modeling, and Optimization for Camera-Based Tactile SensorAdvanced Intelligent Systems, 2025 -
 Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot ManipulationICRA, 2024
Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot ManipulationICRA, 2024 -
 Intersection-Free Robot Manipulation With Soft-Rigid Coupled Incremental Potential ContactIEEE Robotics and Automation Letters, 2024
Intersection-Free Robot Manipulation With Soft-Rigid Coupled Incremental Potential ContactIEEE Robotics and Automation Letters, 2024 -
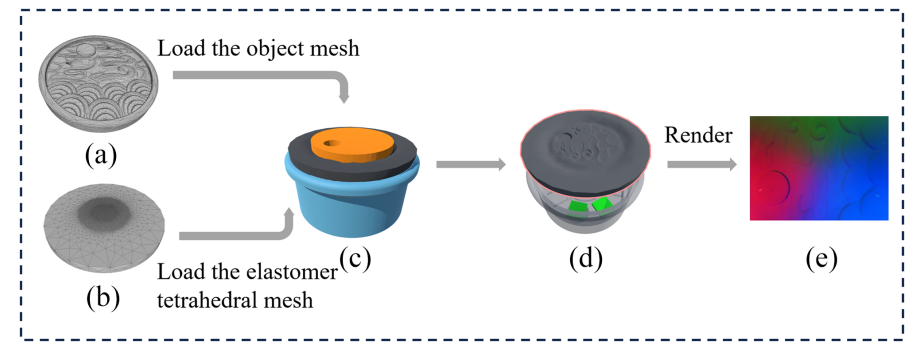 TacIPC: Intersection-and Inversion-Free FEM-Based Elastomer Simulation for Optical Tactile SensorsIEEE Robotics and Automation Letters, 2024
TacIPC: Intersection-and Inversion-Free FEM-Based Elastomer Simulation for Optical Tactile SensorsIEEE Robotics and Automation Letters, 2024 -
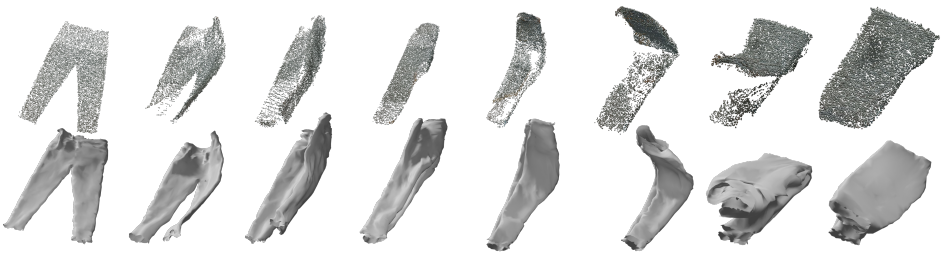 Clothpose: A real-world benchmark for visual analysis of garment pose via an indirect recording solutionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023
Clothpose: A real-world benchmark for visual analysis of garment pose via an indirect recording solutionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023